
As people age, their ability to walk decreases, leading to mobility limitations and affecting independence and overall quality of life. Therefore, researchers are interested in developing solutions that improve mobility, and wearable devices are a possible solution in robotics.
However, such portable robotic devices are limited to laboratories due to their weight and size. Several studies are working on deriving lightweight construction solutions.
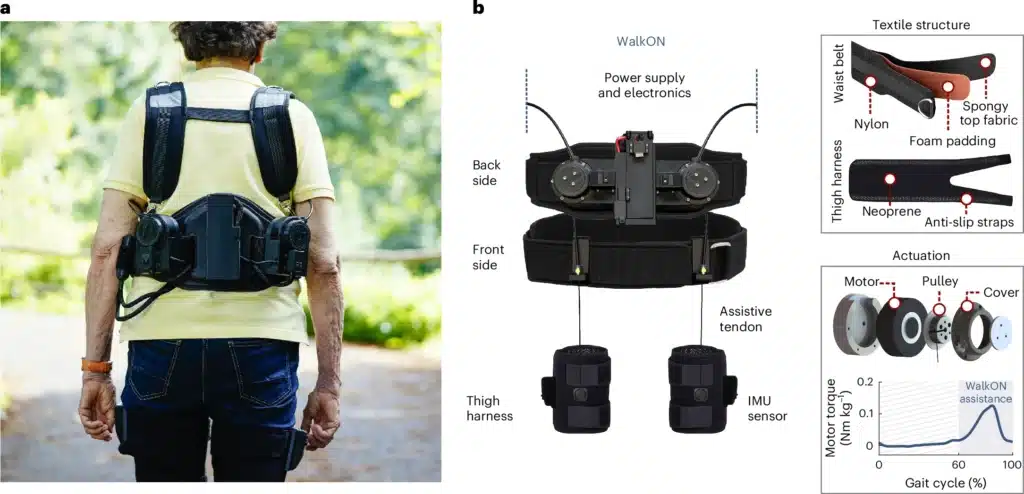
As part of this effort, researchers at Heidelberg University have developed a robotic shorts called WalkON that is designed to improve walking efficiency in older people by supporting hip flexion. The device is designed to be worn over normal clothing and could serve as an everyday walking aid.
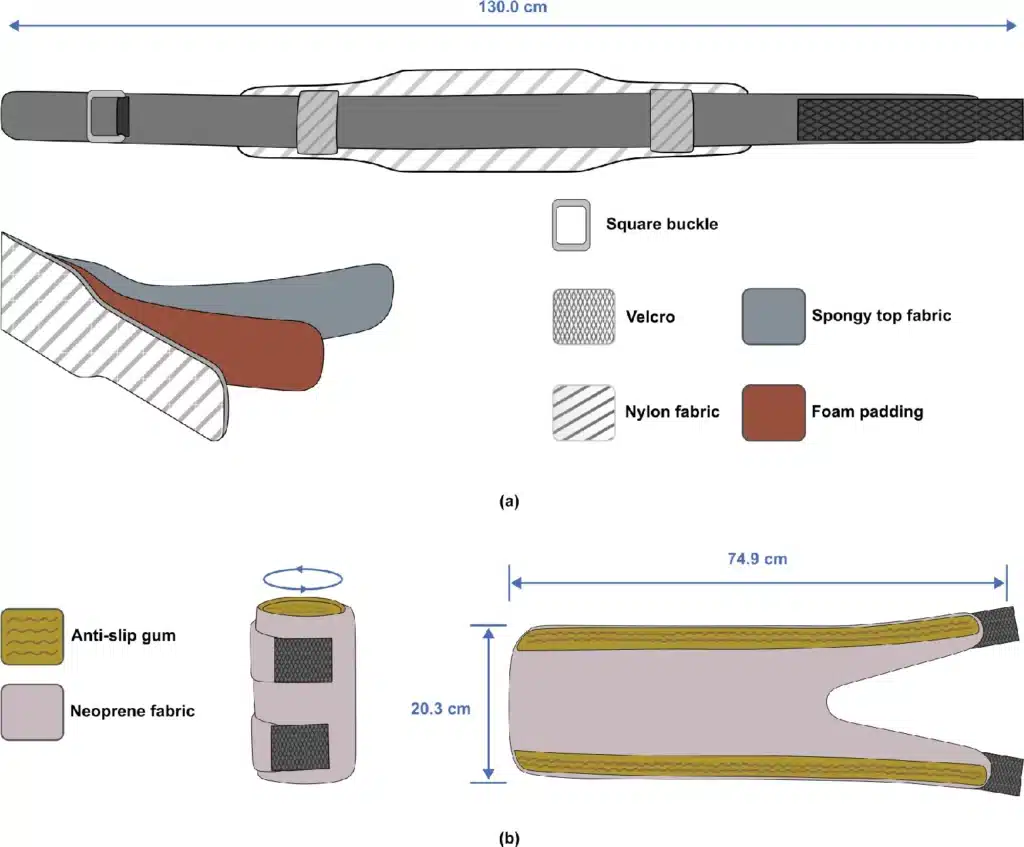
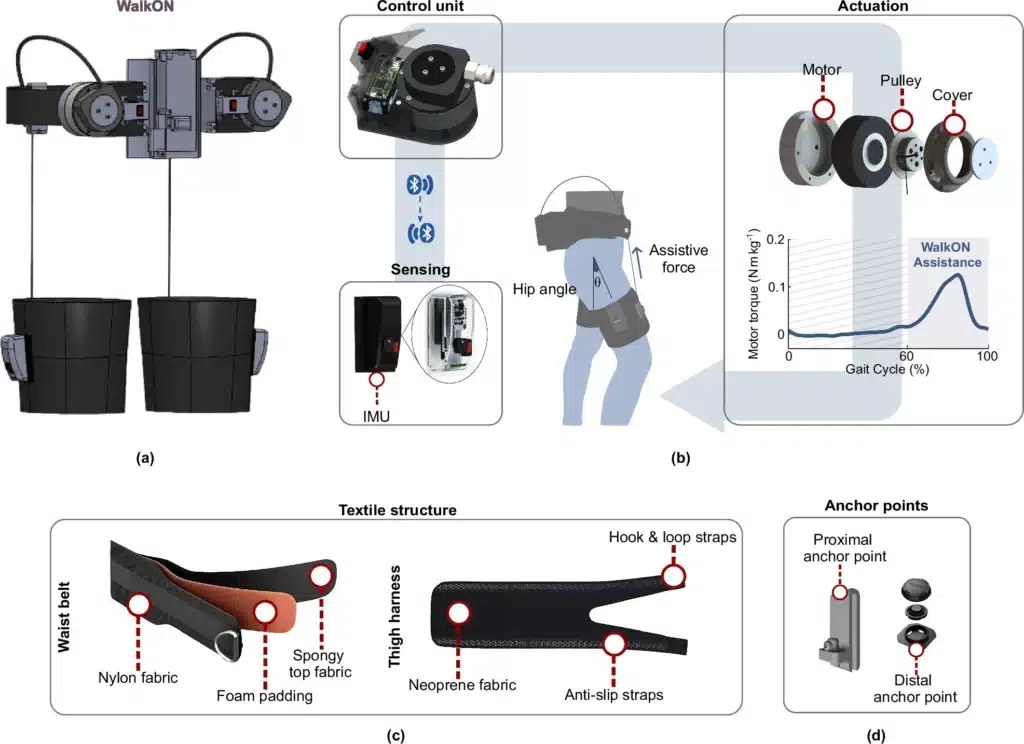
WalkON has one motor per leg, which winds an artificial tendon on a spool (35 mm diameter). The weight of the system is 2.93 kg and is distributed at the height of the user's center of mass to minimize the effects of additional mass. WalkON is attached to the body with a flexible textile structure.
“The main goal of this technology is to improve the autonomy and energy efficiency of its users when walking, with a particular focus on supporting the elderly.” says the study.
The hip joint plays a crucial role in activities such as ground clearance or climbing stairs. The hip joint in particular proves to be critical as we get older. WalkON eases effort by using an artificial, tendon-controlled design to help spread the upward movement of the legs. Portable and lightweight design provides users with a natural leg movement pattern.
Additionally, the study showed that WalkON can reduce the metabolic cost of walking compared to unassisted walking. The metabolic cost of walking is the amount of metabolic energy required to cover one unit of distance.
Researchers examined the effects of WalkON by studying older and young adults. Teens were asked to walk a 500m uphill outdoor hiking trail, and the study found that WalkON reduced the metabolic cost of transportation by 17.79%. Additionally, participants reported better control over their movements using WalkON.
Depression and obesity increase the likelihood of hip pain
When walking a flat 400 m outdoor route, older people reduced their metabolic costs by 10.48% with WalkON.
“WalkON has been shown in a technology evaluation with young people and an effectiveness study with older adults to improve the energy efficiency of walking, contributing to improved mobility. In trials with young participants, WalkON provided an average energy saving of 17.79% compared to walking unassisted, while in older adults we observed an average reduction in transportation costs of 10.48%.”
“In practice, these savings equate to 10.3 kg and 6.3 kg of waist relief for young and older adults, respectively.”
Magazine reference
- Tricomi, E., Missiroli, F., Xiloyannis, M., Lotti, N., Zhang, X., Stefanakis, M., Theisen, M., Bauer, J., Becker, C. & Masia, L. ( 2024). Soft robotic shorts improve outdoor walking efficiency in older adults. Natural machine intelligence1-11. DOI: 10.1038/s42256-024-00894-8